PROYECTO DE ENSAMBLADO Y SOLDADO DE LATERALES
1.-INTRODUCCIÓN
2.-DESCRIPCIÓN
El chasis del coche entra en la celda robotizada mediante un raíl que lo transporta. Mientras el vehículo avanza a su posición de ensamblado los dos Robots KR500 cogen el lateral del vehículo de unos soportes de alimentación de piezas y les aplican un sellante alrededor de todo el lateral.
Una vez el chasis está en posición y los laterales con sellante, se procede a la colocación de los laterales del vehículo, para ello la herramienta del robot está provista de unos cilindros que presionan el lateral contra el chasis para que quede bien sujeto.
Una vez terminado el proceso de ensamblado de los laterales el raíl hace avanzar el chasis hasta la posición de soldadura donde 4 robots KR16 L6 realizan la soldadura por puntos de los laterales.
3.-ELEMENTOS UTILIZADOS
- 2 ROBOTS KR500 L340-2
Son los encargados de la manipulación de los laterales del vehículo. Debido al peso de los laterales, sumado al de la voluminosa herramienta, he optado por la gama KR500, y en concreto el L340-2 para así tener un gran alcance para aplicar el sellante en los laterales.



- 4 ROBOTS KR16 L6
Debido a la necesidad de una buena movilidad y alcance he optado por la instalación de este modelo para la tarea de soldado de los laterales.









 Archivos
Archivos
7.- PROGRAMAS
KR500_1



KR500_2



 KR16_1
KR16_1
 KR16_2
KR16_2



- 6 KRC4
Es el cerebro del robot. En ella se sitúan los servocontroladores que manejan los motores de cada uno de los ejes, la CPU y las tarjetas de entradas/salidas exteriores y de seguridad.

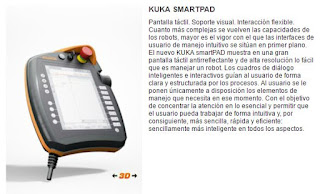
- 6 KUKA SMARTPAD


- 2 HERRAMIENTAS DE SUJECIÓN DE LATERALES(IZQUIERDA Y DERECHA)
Encargadas de la sujeción de los laterales del vehículo.

- 2 SOPORTES DE LATERALES(IZQUIERDA Y DERECHA)
Son los encargados de sujetar los laterales antes de su ensamblado.

- 2 DISPENSADORES DE SELLANTE
Máquina encargada de la inyección de la resina sellante en los laterales del vehículo

- 4 PINZAS DE SOLDADURA POR PUNTOS TIPO C
Su función es la de realizar puntos de soldadura aplicando presión entre las dos piezas a soldar y haciendo pasar una gran corriente a través de unos electrodos lo que eleva la temperatura de los materiales en ese punto, poniendo el material en un estado pastoso en el cual se unen debido a la presión ejercida en el procedimiento.
4.-MEDIDAS DE SEGURIDAD
- SETA DE EMERGENCIA
Detiene todos los elementos de la celda cuando se pulsa, su rearme puede ser giratorio o mediante una llave.

- CELDA DE SEGURIDAD
Es la encargada de limitar físicamente el acceso a la zona de trabajo de los robots.







- BARRERA FOTOELÉCTRICA
Son dispositivos de protección sin contacto con dos o más haces de luz. Si se interrumpe uno o más de los haces de luz, se envía una señal de apagado a la máquina para interrumpir el estado con potencial de riesgo. En la zona de entrada y salida del vehículo estas serán de tipo muting para discriminar solo la entrada del vehículo.


- CERRADURAS DE SEGURIDAD EN LAS PUERTAS
Cerraduras de seguridad que se bloquean durante el proceso de producción y que es necesaria la aplicación de fuerza para su apertura. En el caso de su apertura todos los elementos de la celda deben detenerse. Por seguridad, ante el riesgo de quedar encerrado se dispondrán de setas de emergencia dentro de la celda.

- BALIZAS DE SEÑALIZACIÓN
Indican el estado de la celda y de las fases de muting.

- AUTÓMATA DE SEGURIDAD
Será el encargado de controlar los elementos de seguridad de la celda.

5.- SECUENCIA
6.- ARCHIVOS
7.- PROGRAMAS
KR500_1









KR16_3
 KR16_4
KR16_4


No hay comentarios:
Publicar un comentario